Robot Construction
Author: Vincent Chen
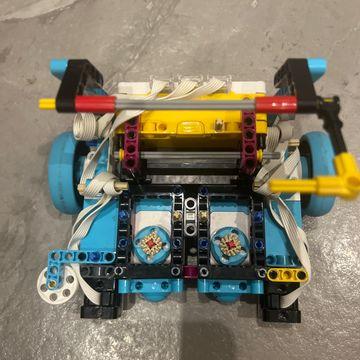
Today, our teammate Luqi, with the help of a few others, finished 3D modelling our robot base, which was named Sideways by our teammate Mia. Using the instruction book generated by Studio 2.0, we as a team built a few models of the robot from which we could make further improvements to assist with the structure. Our robot consists of a sideways hub, an arm for collection behind the robot hub, and two motor gears at the front for attachments. It also uses 2 medium wheels with a ballpoint for balance, and two colour sensors at the front for line following and colour detection for stop lines.
Particularly, after a team evaluation, we noticed that our robot had a few strengths and weaknesses. Our main strengths were that there were two sensors in the front, which allowed us to use coding to easily detect colours on the field, which also would later help us with Robot Navigation. What the Sideways also did well was the fact that the robot Hub was on the side, meaning that we had more space for attachments.
Some drawbacks that we noticed were that most of the weight was focused on the back wheels, which could cause potential issues with traction, as weight imbalances could affect the robot performance. However we decided that this issue was easily mitigated by further testing the code for imbalances between different attachments. This would be slightly more time-consuming, however accuracy is always important than having more runs. Another small issue with the robot was that the only flat surface it had was the hub, which could prove to be difficult in missions that require a pushing force. However, this issue would also be quite easily mitigated with an effective attachment.
Leave a Reply